Yalpalama itme sistemi veya vernierlerden daha temel, bir roket (veya herhangi bir mermi (örneğin, mermi)) üzerindeki "ağırlık merkezi" ile "basınç merkezi" arasındaki ilişkidir.
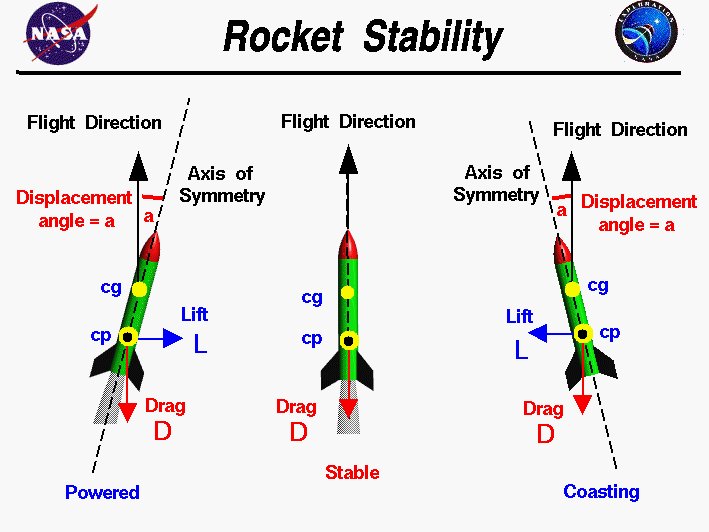
Roketin burun öne doğru uçması ve ters dönmemesi için ağırlık merkezinin basınç merkezinin önünde olması gerekir.Küçük amatör veya model roketlerin yapımında, kılavuz her zaman CG'nin en az 1 gövde çapının önünde olması gerektiğidir. CP.
Ağırlık merkezi, roketin kütle bileşenlerinin yere göre "hareket ettiği" noktadır (yani, hesaplama yaparken CG'yi "roketi" temsil eden bir nokta olarak değerlendirebilirsiniz. roketi aşağı doğru çeken karşıt yerçekimi kuvveti). Basınç merkezi, roket gövdesi, burun ve herhangi bir kanat üzerindeki aerodinamik kuvvetlerin toplandığı ve "hareket ettiği" noktadır.
Yukarıdaki gimballed itme ile ilgili yanıtta, örneğin, gimballer aslında CP'yi CG'nin altına, burun tamamen lts. Yüzgeçler (örneğin, füzeler veya model roketlerdeki), CP'yi CG altında tutmak için aynı şekilde hareket eder.
Dolayısıyla, bunu yapmak için bireysel teknolojiler değişebilir, ancak buradaki temel ilke CG / CP ilişkisidir. . Umarım yardımcı olur.
https://web.archive.org/web/20130216063642/http://exploration.grc.nasa.gov/education/rocket/rktcp.html